Archaeological Macrobotanic Collection System
Students: Ethan Kerr (ME), KeyRy Marquez (CE), Julia Snyder (ME), Gabriella Villaplana (ME)
Advisor: Dr. Jandro Abot
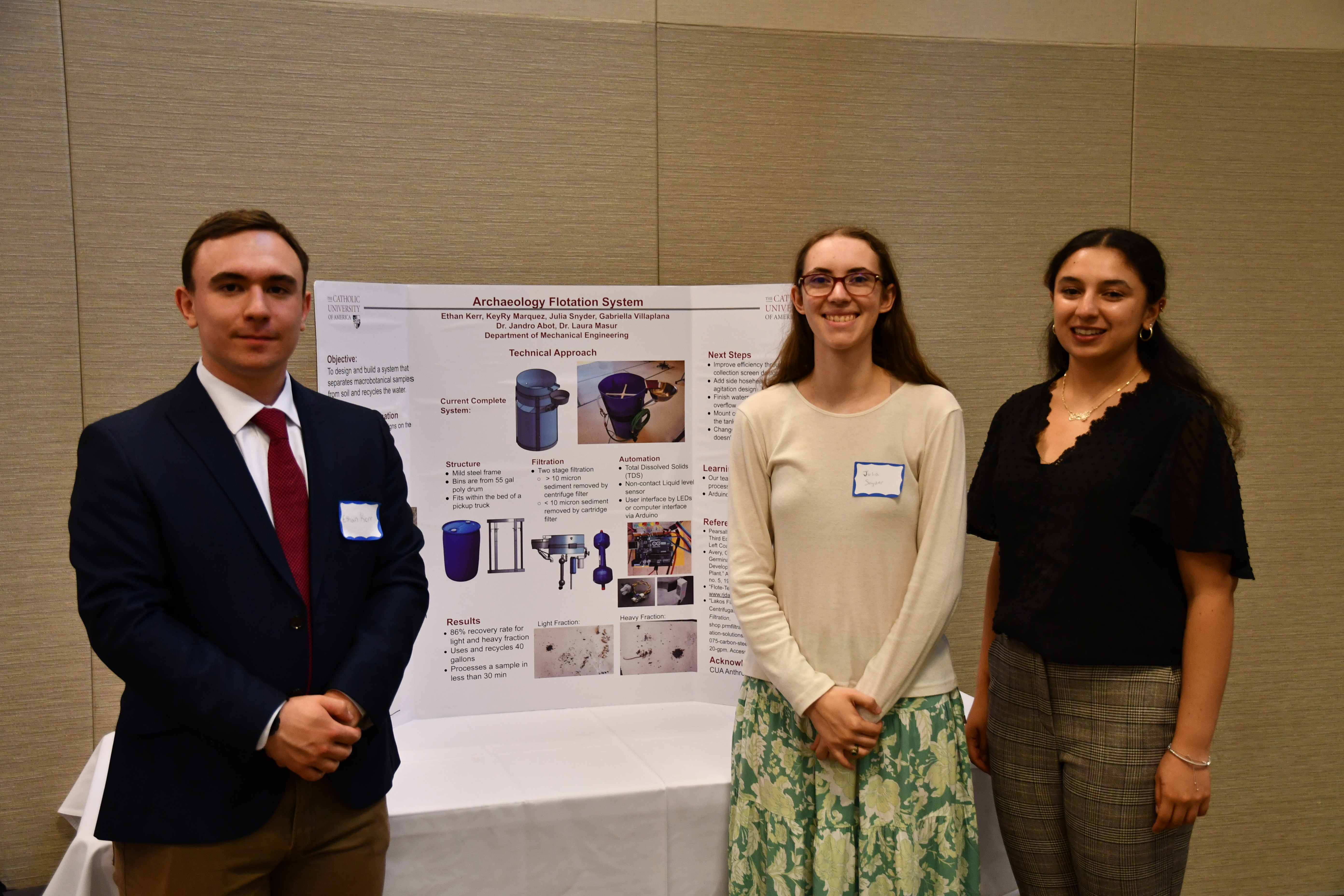 The Archaeological Macrobotanic Collection System project aimed to design and build a system for separating macrobotanical remains from soil samples and recycling water used in the process. One archaeological practice involves collecting soil samples to analyze small elements such as bits of ceramics, glass, brick, and macrobotanics which are seeds, charcoal, and other organic materials. When the soil sample is mixed with water the macrobotanics float and can be collected. While there is a commercial system for this purpose most archaeology departments rely on DIY systems, which leads to the practice being underutilized and unstandardized. Our system seeks to solve this problem by matching the standards of the commercial system while maintaining an economic production cost, and including system water filtration which is absent on all current systems. The addition of filtration allows for reduced water requirements and greater field use capabilities. To meet these goals our system was built for under $2000 and had to continuously run while processing various soil types and maintaining a high macrobotanic recovery rate.
The Archaeological Macrobotanic Collection System project aimed to design and build a system for separating macrobotanical remains from soil samples and recycling water used in the process. One archaeological practice involves collecting soil samples to analyze small elements such as bits of ceramics, glass, brick, and macrobotanics which are seeds, charcoal, and other organic materials. When the soil sample is mixed with water the macrobotanics float and can be collected. While there is a commercial system for this purpose most archaeology departments rely on DIY systems, which leads to the practice being underutilized and unstandardized. Our system seeks to solve this problem by matching the standards of the commercial system while maintaining an economic production cost, and including system water filtration which is absent on all current systems. The addition of filtration allows for reduced water requirements and greater field use capabilities. To meet these goals our system was built for under $2000 and had to continuously run while processing various soil types and maintaining a high macrobotanic recovery rate.
Capstan Redesign
Students: Roberto Henriquez Zavala (CE), Derrick Aikens (CE), Zach Williams (ME), Adaire Ogundeko (CE & Arch)
Advisor: Dr. Gerard Carroll
 Catholic University, in partnership with HII, is embarking on a groundbreaking project to revolutionize maritime operations by enhancing capstan systems. The primary goal is to engineer a state-of-the-art capstan that surpasses conventional standards, emphasizing size, strength, and pioneering advancements in control systems and long-term maintenance efficiency. This project addresses practical challenges faced by HII specifically in the context of pulling and guiding vessels into dry docks with the use of capstans. The existing capstans are considered obsolete, challenging to maintain, and, in some instances, undersized for expected loads. Our endeavor involves developing a notional design for a capstan (motor and gearbox) capable of providing a versatile range of pulling loads. The design also includes a control system and operator interface, with added functionality for coordinating the operation of multiple capstans. The notional design features a dry dock system equipped with five working capstans, creating a realistic simulation of marine applications.
Catholic University, in partnership with HII, is embarking on a groundbreaking project to revolutionize maritime operations by enhancing capstan systems. The primary goal is to engineer a state-of-the-art capstan that surpasses conventional standards, emphasizing size, strength, and pioneering advancements in control systems and long-term maintenance efficiency. This project addresses practical challenges faced by HII specifically in the context of pulling and guiding vessels into dry docks with the use of capstans. The existing capstans are considered obsolete, challenging to maintain, and, in some instances, undersized for expected loads. Our endeavor involves developing a notional design for a capstan (motor and gearbox) capable of providing a versatile range of pulling loads. The design also includes a control system and operator interface, with added functionality for coordinating the operation of multiple capstans. The notional design features a dry dock system equipped with five working capstans, creating a realistic simulation of marine applications.
A key highlight of our redesign is the integration of cutting-edge technology, particularly a lidar sensor. This sensor is designed to transmit critical information for seamless coordination with motors based on the required pull and direction. In contrast to the current capstan, which operates at a fixed speed of 20 ft/min and can pull up to 100,000 lbs, our redesign aims to showcase the capabilities of a more robust motor with variable speed options. The lidar sensor plays a crucial role in creating a smart and adaptive control system. Utilizing Matlab programming, we will establish a sophisticated interface facilitating bidirectional data transmission between Arduino boards and stepper motors. The lidar will provide physical identification of the dry dock, delivering fast and reliable data within a 40-meter range upon ship entry. Through the integration of advanced technologies and meticulous design considerations, our project aspires to redefine capstan systems, setting new benchmarks for efficiency, adaptability, and reliability in the maritime industry. Our unwavering commitment to excellence drives us to deliver not merely a capstan upgrade but a transformative solution that addresses the evolving needs of the industry for years to come.
Bench Model of a Prosthetic Hand with Temperature and Pressure Sensing Capabilities
Students Maria Erquiaga (ME), Elijah Feret (BE), Presley Hays (ME), Madison Hughes (BE), Nicholas Pakaluk (CS)
Advisors: Dr. Jandro Abot, Dr. Peter Lum
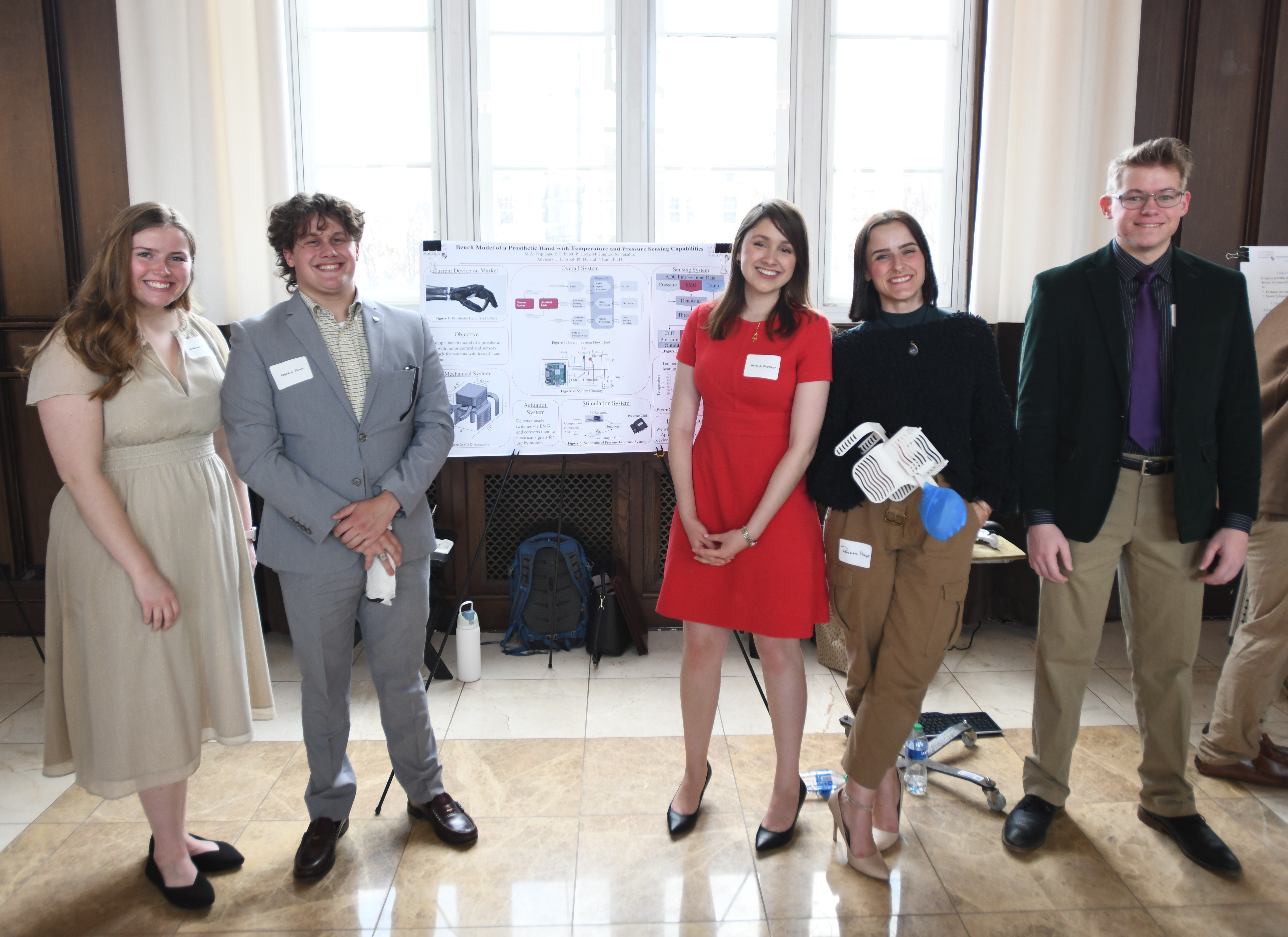 We will present a functional bench model of a prosthetic with sensory feedback for the user. Our aim is to demonstrate the functionality of a simultaneous motor control system and sensory feedback system, in order to improve user experience and decrease prosthetic rejection rates. These systems will be integrated onto a 3D printed model for use by fully able bodied persons. We are using electromyography (EMG) to sense muscle impulses and a servo motor for actuation. Force sensing resistors and thermistors will be used to measure pressure and temperature stimuli at the fingertips, respectively. The readings from these sensors will then activate a modified blood pressure cuff and a series of heating elements on the patient’s right forearm, in proportion to the signals measured by the sensors. All signals will be processed through a Raspberry Pi. The functionality, sensory feedback, and user interface will be assessed in human subject testing.
We will present a functional bench model of a prosthetic with sensory feedback for the user. Our aim is to demonstrate the functionality of a simultaneous motor control system and sensory feedback system, in order to improve user experience and decrease prosthetic rejection rates. These systems will be integrated onto a 3D printed model for use by fully able bodied persons. We are using electromyography (EMG) to sense muscle impulses and a servo motor for actuation. Force sensing resistors and thermistors will be used to measure pressure and temperature stimuli at the fingertips, respectively. The readings from these sensors will then activate a modified blood pressure cuff and a series of heating elements on the patient’s right forearm, in proportion to the signals measured by the sensors. All signals will be processed through a Raspberry Pi. The functionality, sensory feedback, and user interface will be assessed in human subject testing.
Aluminum Modular Gangway Design
Students: MaryJane Hughes (CE & Arch), Isabella Bernard (CE & Arch), Ignacio Puig Irizarry (CE & Arch)
Advisor: Dr. Gerard Carroll
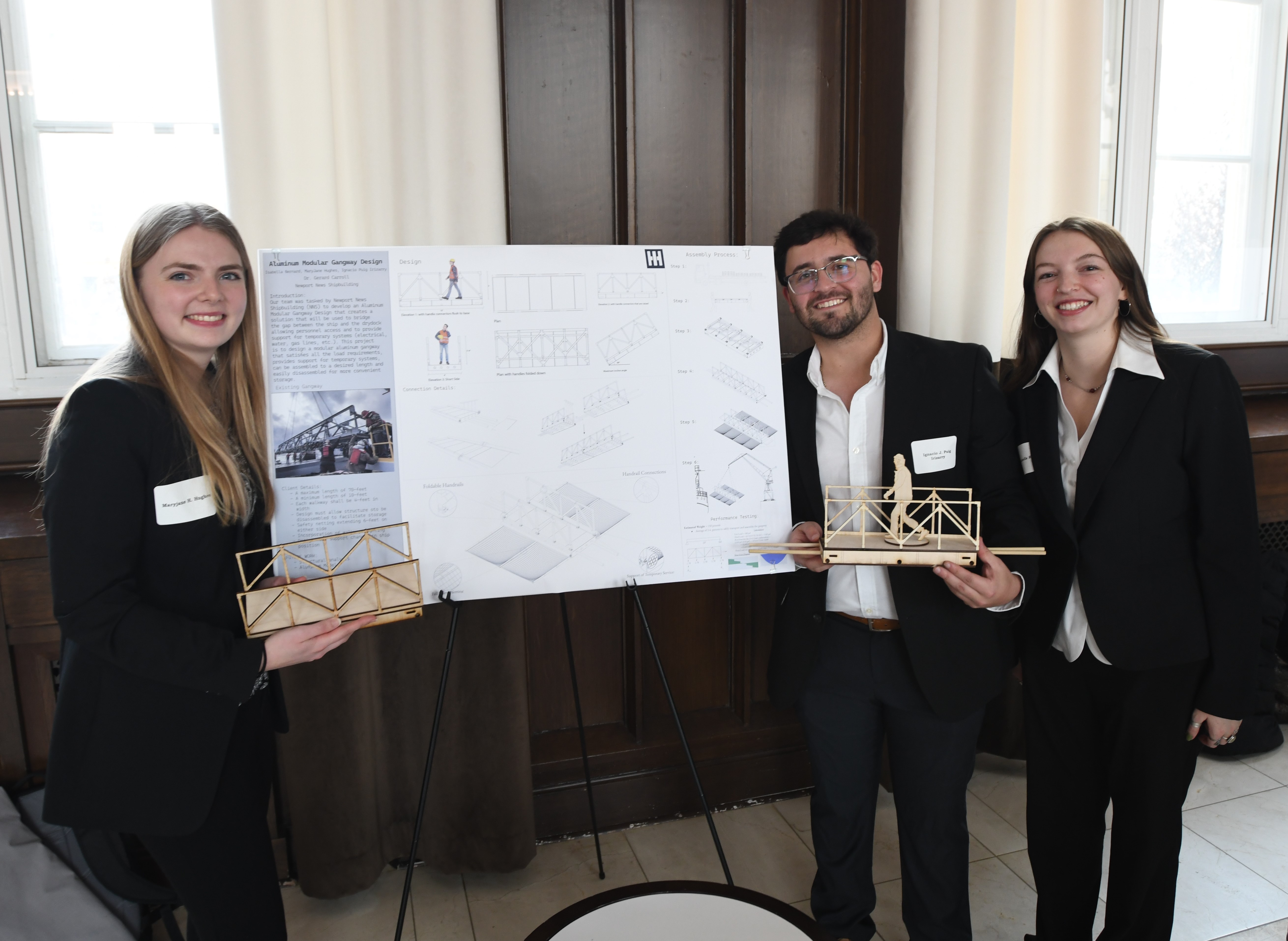 The maritime industry heavily relies on gangways for safe personnel access between ships and docks. Traditional gangways, typically one-piece steel structures, face challenges due to weight and lack of modularity. To address this, a project introduces a new solution: modular aluminum gangways. These offer flexibility in length configurations and easy disassembly for storage. Designed for various ship types, from submarines to aircraft carriers, they meet load requirements while enhancing mobility and storage convenience. Analysis reveals a need for innovation in weight, modularity, and storage. The aluminum gangway prototype caters to diverse needs, prioritizing lightweight durability. Key features include easy attachment, collapsible handrails, safety nets, and lighting for enhanced safety. The modular design optimizes storage and transportation. This innovation promises to improve operational efficiency and safety in maritime and port industries, departing from conventional one-piece steel gangways. It signifies a significant advancement in maritime infrastructure.
The maritime industry heavily relies on gangways for safe personnel access between ships and docks. Traditional gangways, typically one-piece steel structures, face challenges due to weight and lack of modularity. To address this, a project introduces a new solution: modular aluminum gangways. These offer flexibility in length configurations and easy disassembly for storage. Designed for various ship types, from submarines to aircraft carriers, they meet load requirements while enhancing mobility and storage convenience. Analysis reveals a need for innovation in weight, modularity, and storage. The aluminum gangway prototype caters to diverse needs, prioritizing lightweight durability. Key features include easy attachment, collapsible handrails, safety nets, and lighting for enhanced safety. The modular design optimizes storage and transportation. This innovation promises to improve operational efficiency and safety in maritime and port industries, departing from conventional one-piece steel gangways. It signifies a significant advancement in maritime infrastructure.
Sponsor: Newport News Shipbuilding, Huntington Ingalls Industries
Structural Health Monitoring
Students: Lorenzo Carletti (ME), Joseph Coviello (ME), Norah Fitzsimmons (ME), Michael Hanlon (ME)
Advisor: Dr. Jandro Abot
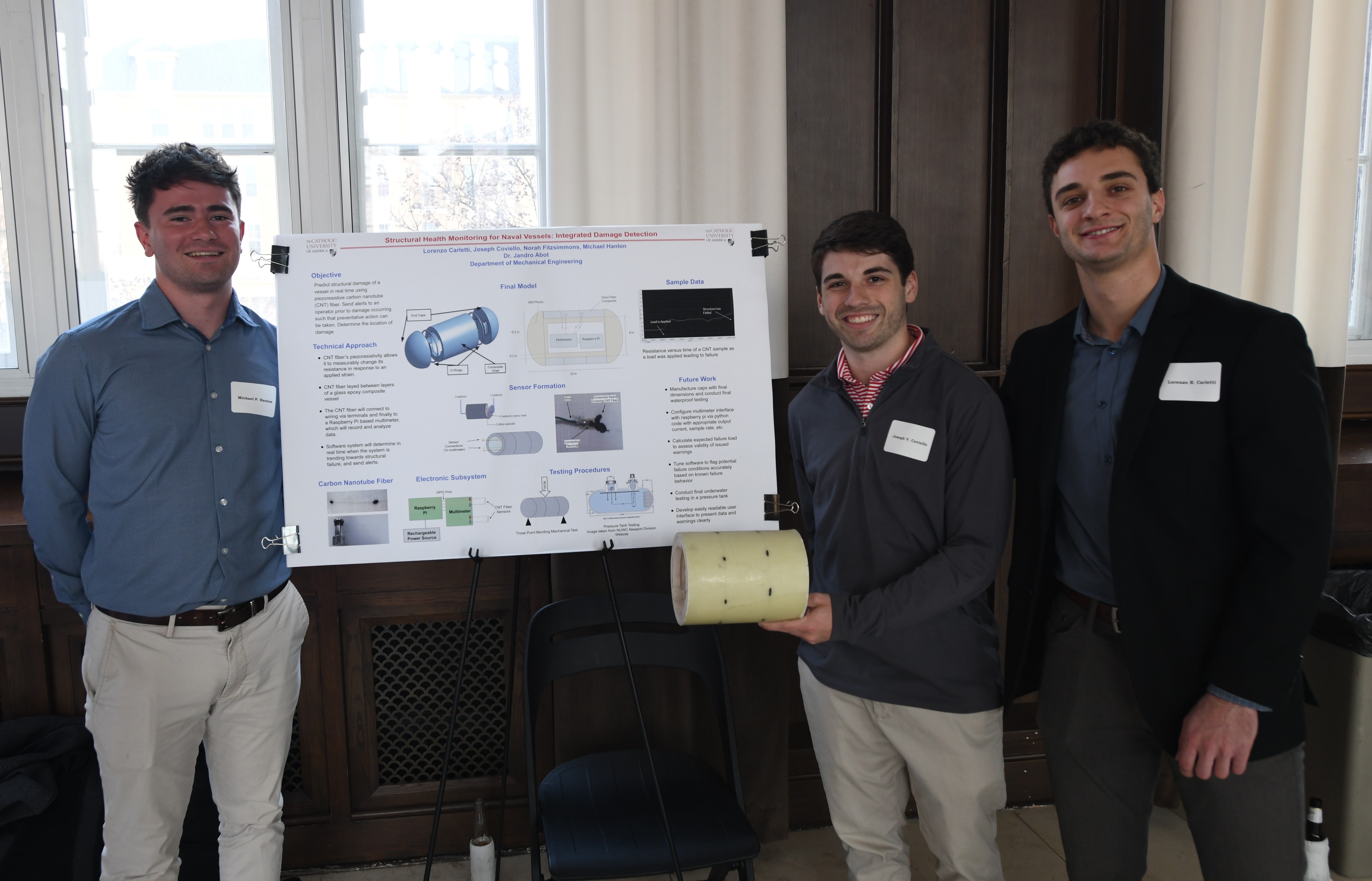 This structural health monitoring project looks to determine damage of a vessel in real time using piezoresistive carbon nanotube fiber. Structural health monitoring can be used to timely identify the cumulative damage, performance, and lifespan of a variety of structures. Naval and aircraft vehicles can often cost billions to build and maintain, however, carbon nanotube (CNT) fibers provide a new alternative that can reduce the maintenance cost and extend the lifespan of a navy vessel. In the current market, there are no real time structural health monitoring systems that are commercially available. The leading alternatives are strain gauge systems and fiber optic systems. The piezoresistivity of the CNT fiber allows for the damage acting on the vessel to be calculated in real time using the change of resistance within the CNT fiber. To model how this method could be integrated into Navy vessels, a small-scale submarine will be fabricated using a 3D printed mandrel and caps, which will then be wrapped with glass fiber and epoxy layers. Within the glass fiber and epoxy layers, CNT fibers will be woven in the form of hoops around the circumference. Through data analysis using a multimeter connected to a Raspberry Pi, the change of resistance measurements at each sensor can be monitored in real time to understand the damage being experienced at different points along the vessel. These sensor statuses will be displayed on a user interface to quickly and easily monitor the different damage levels. Development of this system provides a unique alternative to current methods of structural health monitoring and has the capabilities to reduce Navy budgets while also ensuring safer vessels.
This structural health monitoring project looks to determine damage of a vessel in real time using piezoresistive carbon nanotube fiber. Structural health monitoring can be used to timely identify the cumulative damage, performance, and lifespan of a variety of structures. Naval and aircraft vehicles can often cost billions to build and maintain, however, carbon nanotube (CNT) fibers provide a new alternative that can reduce the maintenance cost and extend the lifespan of a navy vessel. In the current market, there are no real time structural health monitoring systems that are commercially available. The leading alternatives are strain gauge systems and fiber optic systems. The piezoresistivity of the CNT fiber allows for the damage acting on the vessel to be calculated in real time using the change of resistance within the CNT fiber. To model how this method could be integrated into Navy vessels, a small-scale submarine will be fabricated using a 3D printed mandrel and caps, which will then be wrapped with glass fiber and epoxy layers. Within the glass fiber and epoxy layers, CNT fibers will be woven in the form of hoops around the circumference. Through data analysis using a multimeter connected to a Raspberry Pi, the change of resistance measurements at each sensor can be monitored in real time to understand the damage being experienced at different points along the vessel. These sensor statuses will be displayed on a user interface to quickly and easily monitor the different damage levels. Development of this system provides a unique alternative to current methods of structural health monitoring and has the capabilities to reduce Navy budgets while also ensuring safer vessels.
UUV Tracking Algorithm
Students: Albert O’Rawe (CS), Frank Scafuri (CS), Max-Mary Zorblewu (CS)
Advisor: Dr. Gerard Carroll
 Our team’s project is a Tracking Algorithm for Unmanned Underwater Vehicles. This program utilizes regression analysis to determine the accuracy of electromagnetic measurements being used to track the position of the vehicles. The first part of our design poster consists of a brief abstract describing the background of the project and an illustration of the UUV, the pinger, and the magnetometers in an aquatic habitat. The second part of our design poster contains details of the project. There is a summary of the project details, along with a block diagram as a visual aid. The summary entails the description of the methods and their purposes in the program. It also mentions the reasons said methods are optimal for use. The block diagram provides a visual interpretation of the methods to make it simpler for the audience to interpret. The third part of the poster includes the current result and a graphical representation of the result. The graph plotted is a line graph that shows the electromagnetic measurements against the ground truth to show the accuracy of the measurements. There is a legend provided on the graph to show all components. Below this section, there is a section talking of a potential implementation, and an illustration of the implementation.
Our team’s project is a Tracking Algorithm for Unmanned Underwater Vehicles. This program utilizes regression analysis to determine the accuracy of electromagnetic measurements being used to track the position of the vehicles. The first part of our design poster consists of a brief abstract describing the background of the project and an illustration of the UUV, the pinger, and the magnetometers in an aquatic habitat. The second part of our design poster contains details of the project. There is a summary of the project details, along with a block diagram as a visual aid. The summary entails the description of the methods and their purposes in the program. It also mentions the reasons said methods are optimal for use. The block diagram provides a visual interpretation of the methods to make it simpler for the audience to interpret. The third part of the poster includes the current result and a graphical representation of the result. The graph plotted is a line graph that shows the electromagnetic measurements against the ground truth to show the accuracy of the measurements. There is a legend provided on the graph to show all components. Below this section, there is a section talking of a potential implementation, and an illustration of the implementation.
Sponsor: Naval Surface Warefare Center — Carderock
Monitoring Pressure and Depth in Underwater Vessels using Carbon Nanotube Fibers
Students: Hanai Alsharhan (CE), Marguerite Dittmar (CE), Morgan Trechter (CE), Adrian Barbosa (ME)
Advisor: Dr. Jandro Abot
 This project addresses a critical need in underwater vessel safety and operational efficiency through the development of an innovative Structural Health Monitoring (SHM) system. The focus is on developing a solution to the inadequacies of current monitoring systems, which includes developing a system that delivers accurate, real-time depth and pressure data for underwater vessels. A complete working system will improve the current technology for these vessels and allow for further advances in underwater vessel health. The proposed SHM system will utilize carbon nanotube (CNT) fiber as a piezoresistive sensor that will yield an electrical resistance as a function of the strain in the vessel’s wall, that will be later used to calculate the pressure and depth of the vessel. The CNT fiber will then be integrated onto the outside of the vessel. The design incorporates CNT fiber sensors embedded in strips that will wrap around the vessel and undergo pressure and depth changes during prototype testing. The strips are fabricated with polydimethylsiloxane (PDMS), a type of silicone that encases the fiber to protect it from the environment, while also allowing enough ductility for the fiber to produce electrical resistance data. The design features a 3D printed acrylonitrile butadiene styrene (ABS) plastic, waterproof-coated, cap-sealed vessel that will contain a Raspberry Pi inside that is used to collect data from the CNT fiber. This data collection system outputs the change in electrical resistance of the fiber, which allows the calculation of the pressure and depth of the vessel through a system of equations.
This project addresses a critical need in underwater vessel safety and operational efficiency through the development of an innovative Structural Health Monitoring (SHM) system. The focus is on developing a solution to the inadequacies of current monitoring systems, which includes developing a system that delivers accurate, real-time depth and pressure data for underwater vessels. A complete working system will improve the current technology for these vessels and allow for further advances in underwater vessel health. The proposed SHM system will utilize carbon nanotube (CNT) fiber as a piezoresistive sensor that will yield an electrical resistance as a function of the strain in the vessel’s wall, that will be later used to calculate the pressure and depth of the vessel. The CNT fiber will then be integrated onto the outside of the vessel. The design incorporates CNT fiber sensors embedded in strips that will wrap around the vessel and undergo pressure and depth changes during prototype testing. The strips are fabricated with polydimethylsiloxane (PDMS), a type of silicone that encases the fiber to protect it from the environment, while also allowing enough ductility for the fiber to produce electrical resistance data. The design features a 3D printed acrylonitrile butadiene styrene (ABS) plastic, waterproof-coated, cap-sealed vessel that will contain a Raspberry Pi inside that is used to collect data from the CNT fiber. This data collection system outputs the change in electrical resistance of the fiber, which allows the calculation of the pressure and depth of the vessel through a system of equations.