Reverse Engineered Amazon Echo
Students: Luke Bubel (CSC), John Cardillo (CSC), Margaret O'Brien (CSC)
Advisor: Dr. Dominick Rizk
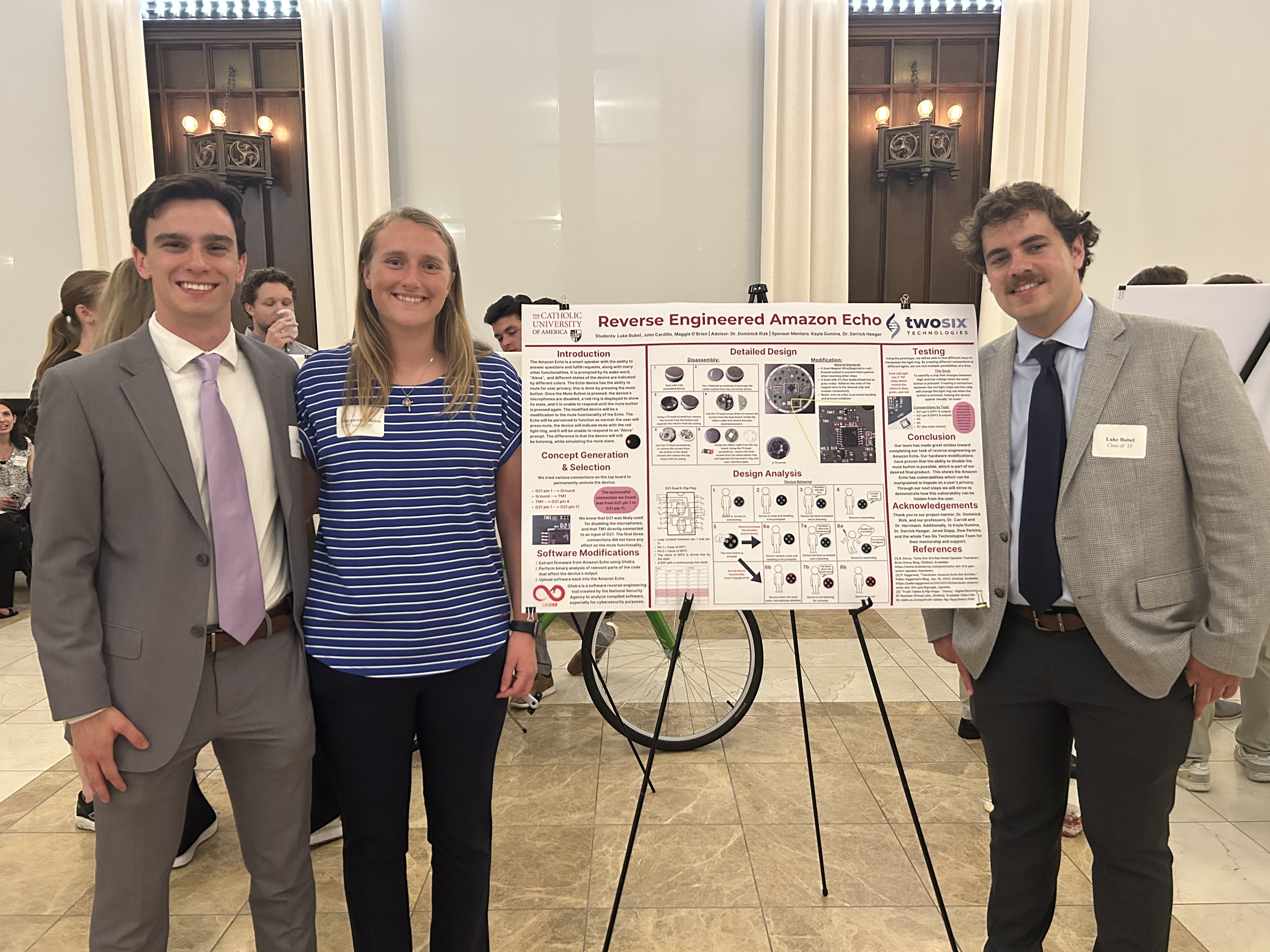 We will present a reverse engineered Amazon Echo. Reverse engineering is the process of learning about the functionality, design, and construction of a device, starting from the final product. We focused on applying reverse engineering techniques to understand the Echo's mute feature, and to reconstruct the device's behavior when a user presses the mute button. To accomplish this, we conducted a hardware triage to determine the path from the push button to the microphones. Next, we generated concepts to disrupt the continuity path by modifying the printed circuit board (PCB). Through testing, we identified a viable chip – a Dual D-Flip Flop (DFF) – to disable the mute functionality. We soldered a connection between one DFF's clock and the other's clear, keeping the clock at a constant low and thereby preventing the microphones from losing power. This highlights a vulnerability in the device, emphasizing the importance of security assessments on IoT devices. The next steps are to modify the software. This entails identifying debug pins on the PCB and testing them using a logic analyzer to uncover digital signals. After decoding these signals, we would alter the software to disguise the hardware modification made. The result is a seemingly functioning Amazon Echo; however, the device will never lose power to the microphones. Our project also acts as a warning to those who buy devices second hand because, if successful, the user would not be able to recognize that the Echo had been manipulated in such a way that their privacy is compromised.
We will present a reverse engineered Amazon Echo. Reverse engineering is the process of learning about the functionality, design, and construction of a device, starting from the final product. We focused on applying reverse engineering techniques to understand the Echo's mute feature, and to reconstruct the device's behavior when a user presses the mute button. To accomplish this, we conducted a hardware triage to determine the path from the push button to the microphones. Next, we generated concepts to disrupt the continuity path by modifying the printed circuit board (PCB). Through testing, we identified a viable chip – a Dual D-Flip Flop (DFF) – to disable the mute functionality. We soldered a connection between one DFF's clock and the other's clear, keeping the clock at a constant low and thereby preventing the microphones from losing power. This highlights a vulnerability in the device, emphasizing the importance of security assessments on IoT devices. The next steps are to modify the software. This entails identifying debug pins on the PCB and testing them using a logic analyzer to uncover digital signals. After decoding these signals, we would alter the software to disguise the hardware modification made. The result is a seemingly functioning Amazon Echo; however, the device will never lose power to the microphones. Our project also acts as a warning to those who buy devices second hand because, if successful, the user would not be able to recognize that the Echo had been manipulated in such a way that their privacy is compromised.
Solar Energy Forecasting Using Machine Learning Regression Models
Lucas Alba (CSC), Jorge Rodriguez-Arraiz (CSC), Simon Vellandurai (CSC)
Advisor: Dr. Dominick Rizk
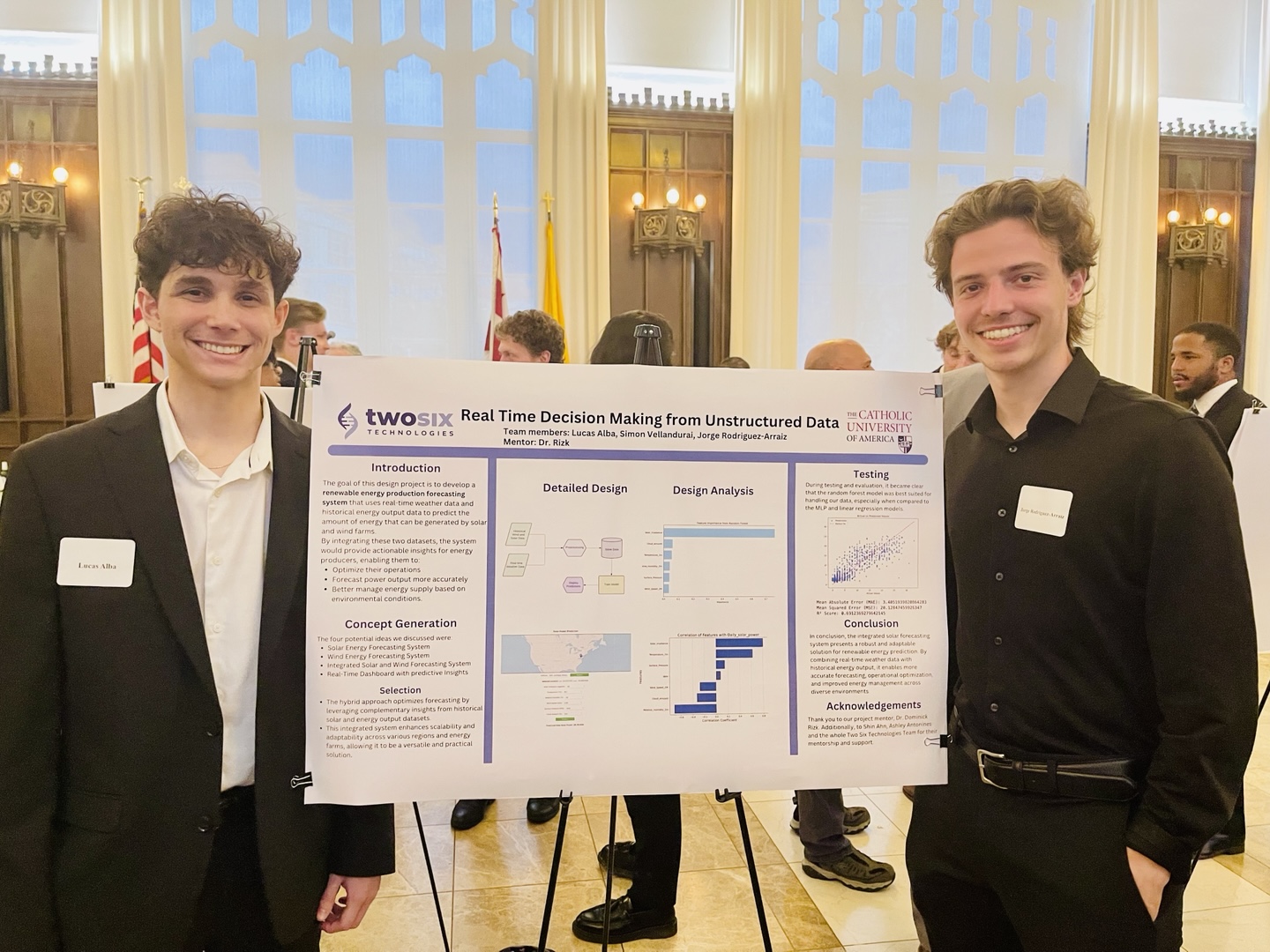 The goal of this project is to develop and deploy a machine learning system capable of forecasting solar energy production based on a few given input features that are known to have a high correlation with output: solar irradiance, cloud cover, temperature, and installed system size. The meteorological data used to train our regression models was gathered online from a publicly available source that tracks and stores historical weather and provides access to real time and forecasted data. The historical solar production data used in training was scraped from an online community platform to which solar energy operators upload their production values on a regular basis. Our team gathered over a year's worth of both weather and production data spanning 2024-2025, and mapped the values by date to form the training and testing datasets. Several regression algorithms for forecasting were explored, including Gradient Boosting Regression (GBR), Multi-Layer Perceptron (MLP) Regression, Random Forest Regression (RFR), and Neural Network Regression (NNR). Model performance was evaluated using metrics such as mean absolute error (MAE), mean squared error (MSE), R² score, and learning curves to assess accuracy and detect overfitting. We found strong predictive performance and generalization in both RFR and NNR models. Accurate forecasting of solar energy production is essential for optimizing the performance and reliability of photovoltaic (solar energy) systems. Our approach promotes better planning and decision making for energy providers, system operators, and consumers, contributing to increased efficiency and sustainability in solar energy operations.
The goal of this project is to develop and deploy a machine learning system capable of forecasting solar energy production based on a few given input features that are known to have a high correlation with output: solar irradiance, cloud cover, temperature, and installed system size. The meteorological data used to train our regression models was gathered online from a publicly available source that tracks and stores historical weather and provides access to real time and forecasted data. The historical solar production data used in training was scraped from an online community platform to which solar energy operators upload their production values on a regular basis. Our team gathered over a year's worth of both weather and production data spanning 2024-2025, and mapped the values by date to form the training and testing datasets. Several regression algorithms for forecasting were explored, including Gradient Boosting Regression (GBR), Multi-Layer Perceptron (MLP) Regression, Random Forest Regression (RFR), and Neural Network Regression (NNR). Model performance was evaluated using metrics such as mean absolute error (MAE), mean squared error (MSE), R² score, and learning curves to assess accuracy and detect overfitting. We found strong predictive performance and generalization in both RFR and NNR models. Accurate forecasting of solar energy production is essential for optimizing the performance and reliability of photovoltaic (solar energy) systems. Our approach promotes better planning and decision making for energy providers, system operators, and consumers, contributing to increased efficiency and sustainability in solar energy operations.
Robot Football Team - Center Mechanism
Students: Mark Dennis (EE), Luke Grossi (ME), Jordan Pulley (EE), Pablo Carreno (CE)
Advisor: Dr. Jeffrey Herrmann
 The Catholic University of America Robot Football team participates in the Collegiate Robot Football Conference (CRFC), where universities compete annually in a robot football game. The robotics team is developing an eight-player robotic football team, consisting of a quarterback, kicker, receivers, and linemen. While all robots share a common base design, each position is distinguished by specialized subsystems. The primary objective is to score more points than the opposing team through touchdowns, field goals, and completed passes. An additional method of scoring involves a robot that can autonomously retrieve the football from the ground and deliver it to the quarterback, without human intervention. This project aims to design and develop an autonomous mechanism capable of performing the snapping function, retrieving the football from the ground and delivering it to the quarterback independently. The mechanism developed for this task features a four-degree-of-freedom (4DOF) arm and claw system, integrated with a camera for target detection. The camera identifies both the football's location on the ground and the target drop-off position for the quarterback. The system is controlled by an Arduino, programmed to operate in a closed-loop configuration, responding to the environment. This project succeeds in two key ways. Firstly, the mechanism can grasp and deliver the football to a specified target location with the press of a button. Moreover, the system is capable of identifying the football's position on the ground independently of its orientation, and can navigate to the quarterback for precise delivery, enabling improved integration with the quarterback's position.
The Catholic University of America Robot Football team participates in the Collegiate Robot Football Conference (CRFC), where universities compete annually in a robot football game. The robotics team is developing an eight-player robotic football team, consisting of a quarterback, kicker, receivers, and linemen. While all robots share a common base design, each position is distinguished by specialized subsystems. The primary objective is to score more points than the opposing team through touchdowns, field goals, and completed passes. An additional method of scoring involves a robot that can autonomously retrieve the football from the ground and deliver it to the quarterback, without human intervention. This project aims to design and develop an autonomous mechanism capable of performing the snapping function, retrieving the football from the ground and delivering it to the quarterback independently. The mechanism developed for this task features a four-degree-of-freedom (4DOF) arm and claw system, integrated with a camera for target detection. The camera identifies both the football's location on the ground and the target drop-off position for the quarterback. The system is controlled by an Arduino, programmed to operate in a closed-loop configuration, responding to the environment. This project succeeds in two key ways. Firstly, the mechanism can grasp and deliver the football to a specified target location with the press of a button. Moreover, the system is capable of identifying the football's position on the ground independently of its orientation, and can navigate to the quarterback for precise delivery, enabling improved integration with the quarterback's position.
Design, Construction, and Testing of an RC Airplane for Humanitarian Aid
Students: Christian Di Nicolantonio (ME), Conor Gross (ME), Brendan Falatko (ME), John Soria (ME)
Advisor: Dr. Diego Turo
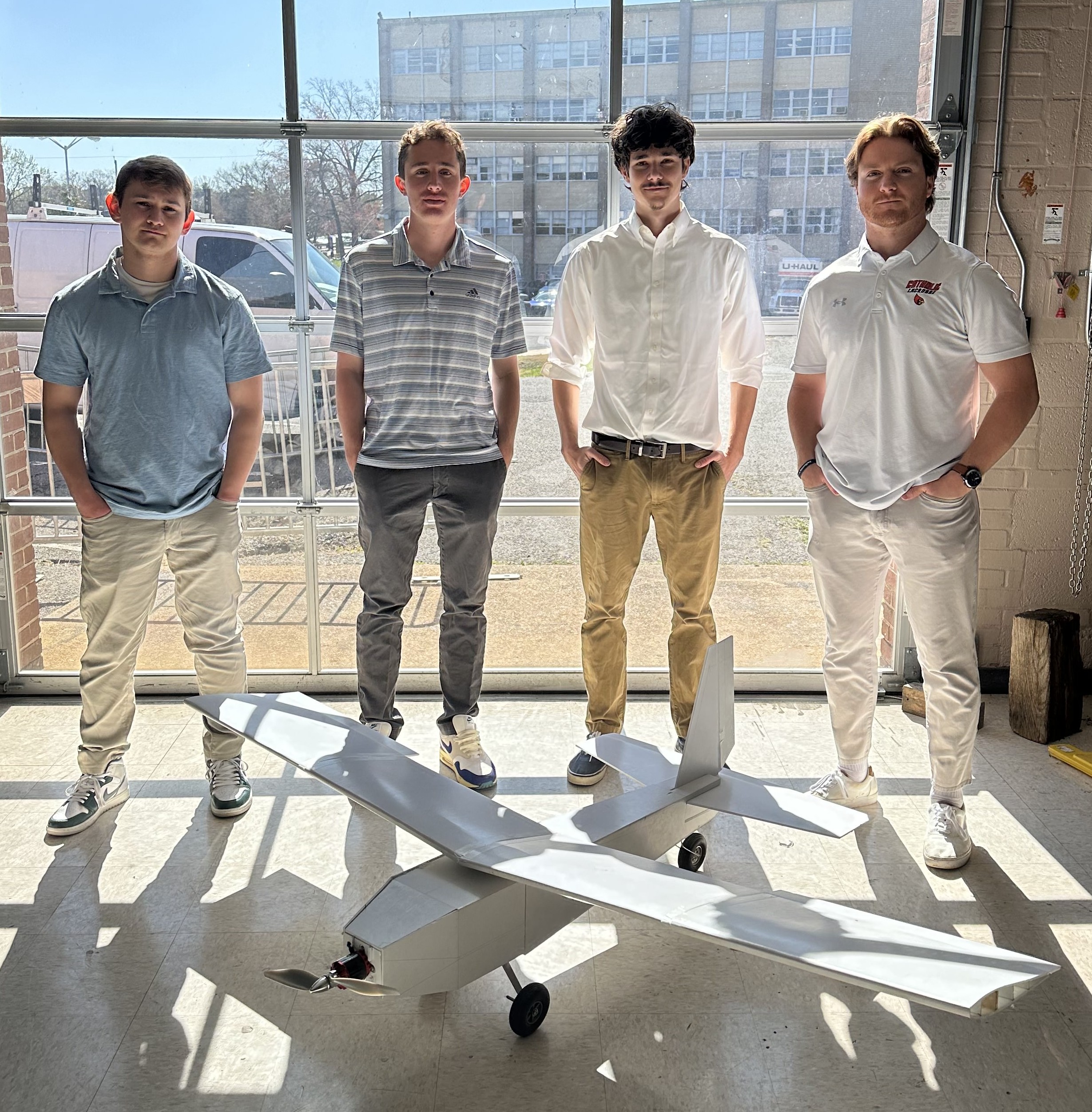 This project focuses on the design, construction, and flight testing of a radio-controlled (RC) airplane engineered for humanitarian aid applications, specifically wildfire detection and response. The aircraft was constructed using lightweight and cost-effective foam materials, as well as wood, to ensure structural integrity while maintaining a low overall weight for enhanced maneuverability and endurance. Glue was used in order to guarantee study connections that increased manufacturability while maintaining structural integrity. A 10-degree dihedral angle was incorporated into the wing design to improve lateral stability and self-correcting flight behavior, critical features for manual operation in the unpredictable environments of real-world testing. The RC plane is equipped with essential electronic components including servo motors to control the primary flight surfaces (elevator, rudder, and ailerons), a motor for propulsion, and an onboard camera system. The integrated visual and thermal cameras are designed to allow for real-time data collection and heat signature detection, allowing the aircraft to effectively identify wildfires and other heat signatures. These features enhance situational awareness in remote or disaster-stricken areas, where access is limited and rapid response is crucial. Flight testing determines the aircraft's stability, responsiveness, and the transmission of imaging data. The results aim to validate the platform's potential for low-cost, scalable humanitarian missions such as disaster assessment, search and rescue, and environmental monitoring.
This project focuses on the design, construction, and flight testing of a radio-controlled (RC) airplane engineered for humanitarian aid applications, specifically wildfire detection and response. The aircraft was constructed using lightweight and cost-effective foam materials, as well as wood, to ensure structural integrity while maintaining a low overall weight for enhanced maneuverability and endurance. Glue was used in order to guarantee study connections that increased manufacturability while maintaining structural integrity. A 10-degree dihedral angle was incorporated into the wing design to improve lateral stability and self-correcting flight behavior, critical features for manual operation in the unpredictable environments of real-world testing. The RC plane is equipped with essential electronic components including servo motors to control the primary flight surfaces (elevator, rudder, and ailerons), a motor for propulsion, and an onboard camera system. The integrated visual and thermal cameras are designed to allow for real-time data collection and heat signature detection, allowing the aircraft to effectively identify wildfires and other heat signatures. These features enhance situational awareness in remote or disaster-stricken areas, where access is limited and rapid response is crucial. Flight testing determines the aircraft's stability, responsiveness, and the transmission of imaging data. The results aim to validate the platform's potential for low-cost, scalable humanitarian missions such as disaster assessment, search and rescue, and environmental monitoring.
Real-Time Biofilm Sensor with Birefringent Chitosan Membranes
Students: Son Pham (BE), Sean O’Mara (CSC), Stephen Thomas (BE), Tala Alturki (BE)
Advisors: Dr. Xiaolong Luo, Dr. Christopher Raub
 Biofilms are groups of microorganisms that are enclosed in "sticky" polysaccharide materials, which are responsible for a myriad of diseases. The behavior of biofilms is difficult to study, so there is a need for a method to observe their nature in real-time. Chitosan membranes exhibit birefringent signals, measured via optical retardance, which indicate the microstructural organization of the chitosan membranes. Our group aims to establish the relationships between flow rate and optical retardance as well as pressure and optical retardance in chitosan membranes in microfluidics chips. In addition, our group aims to provide a proof-of-concept that the aforementioned relationships could be used to sense biofilm behavior in real-time. To accomplish this our group has; designed and fabricated microfluidics chips based on the protocol used in Dr. Luo's lab, fabricated flow-assembled chitosan membranes in said chips, designed customized parts to measure optical retardance using circular polarizing elements, and designed tests to measure optical retardance in chitosan membranes under various conditions. Our group also developed a finite element modeling simulation using the FEBio software in order to simulate the behavior of the chitosan membranes during our testing. Through the results of our group's testing, as well as the FEBio modeling, our group aims to establish a proof of concept for using chitosan membranes to sense biofilms.
Biofilms are groups of microorganisms that are enclosed in "sticky" polysaccharide materials, which are responsible for a myriad of diseases. The behavior of biofilms is difficult to study, so there is a need for a method to observe their nature in real-time. Chitosan membranes exhibit birefringent signals, measured via optical retardance, which indicate the microstructural organization of the chitosan membranes. Our group aims to establish the relationships between flow rate and optical retardance as well as pressure and optical retardance in chitosan membranes in microfluidics chips. In addition, our group aims to provide a proof-of-concept that the aforementioned relationships could be used to sense biofilm behavior in real-time. To accomplish this our group has; designed and fabricated microfluidics chips based on the protocol used in Dr. Luo's lab, fabricated flow-assembled chitosan membranes in said chips, designed customized parts to measure optical retardance using circular polarizing elements, and designed tests to measure optical retardance in chitosan membranes under various conditions. Our group also developed a finite element modeling simulation using the FEBio software in order to simulate the behavior of the chitosan membranes during our testing. Through the results of our group's testing, as well as the FEBio modeling, our group aims to establish a proof of concept for using chitosan membranes to sense biofilms.
Student Steel Bridge Competition
Students: Darren Horton (CE), Joseph Lambiase (CE), Jonathan Velasquez (CE), Tyler-Jade Chandler (CE)
Advisor: Dr. Jason Davison
 Each year the American Society of Civil Engineers and the American Institute of Steel Construction host an international Student Steel Bridge Competition that challenges students in a hands-on steel-design project. The objective of the Catholic University student team is to design, fabricate, and construct an efficient scale-model steel bridge that spans approximately 20 feet and can carry 2,500 pounds according to the competition rules. The problem statement is based on the Skunk River Water Trail which provides a river corridor running through Story County, Iowa. The judging criteria of the bridge include aesthetics, construction speed, lightness, stiffness, construction economy, structural efficiency, and cost estimation. The steel model bridge is required to fit a staged construction zone that will mimic the river environment. The model will consist of multiple welded members which are bolted together. The main judging criteria are based on the vertical and lateral deflections that test the structural durability of the bridge itself. The vertical load test, which measures the aggregate deflection, will place 2500 pounds on the stringers. The lateral load test, which tests the sway, will consist of 50 pounds. The bridges for this test will be ranked based on the lowest deflections. The culmination of this year's efforts took place on March 28th at the Mid-Atlantic East & West Regional Competition hosted by Penn State University, where the meticulously crafted bridges from across the region were constructed and tested in various ways.
Each year the American Society of Civil Engineers and the American Institute of Steel Construction host an international Student Steel Bridge Competition that challenges students in a hands-on steel-design project. The objective of the Catholic University student team is to design, fabricate, and construct an efficient scale-model steel bridge that spans approximately 20 feet and can carry 2,500 pounds according to the competition rules. The problem statement is based on the Skunk River Water Trail which provides a river corridor running through Story County, Iowa. The judging criteria of the bridge include aesthetics, construction speed, lightness, stiffness, construction economy, structural efficiency, and cost estimation. The steel model bridge is required to fit a staged construction zone that will mimic the river environment. The model will consist of multiple welded members which are bolted together. The main judging criteria are based on the vertical and lateral deflections that test the structural durability of the bridge itself. The vertical load test, which measures the aggregate deflection, will place 2500 pounds on the stringers. The lateral load test, which tests the sway, will consist of 50 pounds. The bridges for this test will be ranked based on the lowest deflections. The culmination of this year's efforts took place on March 28th at the Mid-Atlantic East & West Regional Competition hosted by Penn State University, where the meticulously crafted bridges from across the region were constructed and tested in various ways.
Low-Cost Automated Digital Microscope System for Microplastics Research
Students: Madison Brausch (ME), Isabel Kessler (CSC), James Young (EE), Juan Garcia (CE)
Advisor: Dr. Jason Davison
 Widespread microplastic pollution threatens our health as well as the world around us, yet detection remains costly. Our project presents two low-cost, user-friendly systems to make microplastic research accessible to all. The first design focused on hacking an Ender 3D printer, by replacing its extruder with a USB camera. The hacking required new G-code that moves the camera on a grid like pattern. Additionally, the camera moves in the z-axis to take several pictures at different focus levels. Once the best picture is selected, using an open-source algorithm, the images are stitched together into one larger high-resolution photo. Finally, the image is analyzed using CV to detect the presence of microplastics. This process is fully automated and operable with the press of a single button, and the total system cost under $350, significantly below alternative solutions (>$10,000). Our second design is significantly more cost-effective because it uses 3D-printed parts with readily available materials to achieve a similar two-axis motion required for imaging. While this alternative is more complex, because it requires a 3D printer and electrical wiring, it reduces the cost to $191. The tradeoff, over the off-the-shelf solution, is a slower platform and longer image acquisition time. Both of our systems are open-source and designed to democratize microplastic research by combining low cost, accessibility, and practical effectiveness—bringing crucial environmental analysis within reach of more communities.
Widespread microplastic pollution threatens our health as well as the world around us, yet detection remains costly. Our project presents two low-cost, user-friendly systems to make microplastic research accessible to all. The first design focused on hacking an Ender 3D printer, by replacing its extruder with a USB camera. The hacking required new G-code that moves the camera on a grid like pattern. Additionally, the camera moves in the z-axis to take several pictures at different focus levels. Once the best picture is selected, using an open-source algorithm, the images are stitched together into one larger high-resolution photo. Finally, the image is analyzed using CV to detect the presence of microplastics. This process is fully automated and operable with the press of a single button, and the total system cost under $350, significantly below alternative solutions (>$10,000). Our second design is significantly more cost-effective because it uses 3D-printed parts with readily available materials to achieve a similar two-axis motion required for imaging. While this alternative is more complex, because it requires a 3D printer and electrical wiring, it reduces the cost to $191. The tradeoff, over the off-the-shelf solution, is a slower platform and longer image acquisition time. Both of our systems are open-source and designed to democratize microplastic research by combining low cost, accessibility, and practical effectiveness—bringing crucial environmental analysis within reach of more communities.
Smart Stormwater Collection System
Students: Ethan Hinds (EnvEn), Fitz McLaughlin (CE), Casey Westall (EnvEn), Omer Alanazi (CE)
Advisor: Dr. Arash Massoudieh
 This project focuses on the design of a stormwater holding tank to optimize water release based on predicted rainfall, enhancing flood mitigation efforts and erosion control on the CUA campus. The system will be implemented on the Crough Building and will integrate National Oceanic Atmospheric Administration (NOAA) weather forecasting to regulate outflow. A fully automated solenoid valve system, controlled by a Raspberry Pi, will adjust water discharge rates based on forecasted precipitation—releasing more water ahead of dry conditions and conserving storage capacity during heavy rainfall. Our barrel features an overflow exit designed to protect the electronic components from water damage. Additionally, the overflow will be directed by a concrete curb, ensuring proper drainage into the stormwater sewer system. An ultrasonic sensor will monitor water levels within the tank. The sensor transmits real-time depth readings to the Raspberry Pi, which processes this data alongside NOAA precipitation forecast. By using programmed code, the Raspberry Pi determines the optimal release rate to maintain effective water drainage while reducing velocity to minimize erosion. This automated stormwater management system not only addresses an ongoing erosion and flooding problem, but advances the capabilities of stormwater retention and future distribution. This design could serve as a model for other urban areas looking to improve their stormwater drainage systems.
This project focuses on the design of a stormwater holding tank to optimize water release based on predicted rainfall, enhancing flood mitigation efforts and erosion control on the CUA campus. The system will be implemented on the Crough Building and will integrate National Oceanic Atmospheric Administration (NOAA) weather forecasting to regulate outflow. A fully automated solenoid valve system, controlled by a Raspberry Pi, will adjust water discharge rates based on forecasted precipitation—releasing more water ahead of dry conditions and conserving storage capacity during heavy rainfall. Our barrel features an overflow exit designed to protect the electronic components from water damage. Additionally, the overflow will be directed by a concrete curb, ensuring proper drainage into the stormwater sewer system. An ultrasonic sensor will monitor water levels within the tank. The sensor transmits real-time depth readings to the Raspberry Pi, which processes this data alongside NOAA precipitation forecast. By using programmed code, the Raspberry Pi determines the optimal release rate to maintain effective water drainage while reducing velocity to minimize erosion. This automated stormwater management system not only addresses an ongoing erosion and flooding problem, but advances the capabilities of stormwater retention and future distribution. This design could serve as a model for other urban areas looking to improve their stormwater drainage systems.
Designing a New Engineering Building
Students: Annemarie Donachie (CE/Arch), Jasper Grubb (ME), John Hadden (ME), Helen McDaniel (CE)
Advisor: Dr. Rebecca Kiriazes
 The School of Engineering is critical in university growth; however, the existing Pangborn Hall, with a capacity of just over 800 students, is insufficient to hold the anticipated increase to an estimated 1,400 students. Prior to designing a new engineering building, a feasibility study was completed which included analyzing the building and site existing conditions, planning requirements, Failure Mode Engineering Analysis (FMEA), Design for “X” discussions, and a precedent study of twenty newly constructed engineering buildings at comparable universities. Based on the study findings, four different massing options were created and evaluated against ten different performance criteria: daylight hours, noise, wind, pedestrian flow, potential green spaces, stormwater retention, solar power, cost, connectivity to campus, and construction timeline. The massings were brought to multiple roundtable discussions with students, faculty, and the campus architect, with additional feedback received from a virtual survey distributed to the School of Engineering. Using the performance criteria and referencing the consolidated feedback, a final massing was chosen and then refined to better serve stakeholder needs based on their feedback. The final massing allowed for detailed calculations regarding LEED certification, stormwater management, an outdoor stairwell design to enhance connectivity, construction site layout, and structural design. Key features of the design include a three-story atrium, a two-story auditorium, a two-story maker space, and two green roofs. Both a physical model and virtual renderings were produced to fully visualize the proposed structure. This study lays the groundwork for the School of Engineering’s long-term growth and enhanced learning.
The School of Engineering is critical in university growth; however, the existing Pangborn Hall, with a capacity of just over 800 students, is insufficient to hold the anticipated increase to an estimated 1,400 students. Prior to designing a new engineering building, a feasibility study was completed which included analyzing the building and site existing conditions, planning requirements, Failure Mode Engineering Analysis (FMEA), Design for “X” discussions, and a precedent study of twenty newly constructed engineering buildings at comparable universities. Based on the study findings, four different massing options were created and evaluated against ten different performance criteria: daylight hours, noise, wind, pedestrian flow, potential green spaces, stormwater retention, solar power, cost, connectivity to campus, and construction timeline. The massings were brought to multiple roundtable discussions with students, faculty, and the campus architect, with additional feedback received from a virtual survey distributed to the School of Engineering. Using the performance criteria and referencing the consolidated feedback, a final massing was chosen and then refined to better serve stakeholder needs based on their feedback. The final massing allowed for detailed calculations regarding LEED certification, stormwater management, an outdoor stairwell design to enhance connectivity, construction site layout, and structural design. Key features of the design include a three-story atrium, a two-story auditorium, a two-story maker space, and two green roofs. Both a physical model and virtual renderings were produced to fully visualize the proposed structure. This study lays the groundwork for the School of Engineering’s long-term growth and enhanced learning.