Spiral Acoustic Array Redesign
Students: My Cao (ME), Kiera Price (ME), Timothy Kling (CE), Jessie Lee (CE)
Advisor: Dr. Gerard Carroll
 The spiral acoustic array redesign aims to provide a more ergonomic, durable, and portable base in order to optimize deployment and transportation, minimize the amount of tools required, and reduce strain on the cables. This is critical because it will allow for the efficient and accurate measurement of sound wave propagation over water. This improved design utilizes custom-designed hinges to enable a foldable aluminum extrusion frame that eliminates the need for extensive disassembly. By replacing the previous double-extrusion system with a lighter single-extrusion design, the array becomes more transportable without compromising structural integrity. Stability is maintained through the use of sandbags strategically placed on the base. Integrated handles allow for easier carrying, while the foldable design ensures the system can be quickly deployed or packed away without tools. These improvements directly support operational efficiency, particularly in field conditions where time and ease of setup are crucial.
The spiral acoustic array redesign aims to provide a more ergonomic, durable, and portable base in order to optimize deployment and transportation, minimize the amount of tools required, and reduce strain on the cables. This is critical because it will allow for the efficient and accurate measurement of sound wave propagation over water. This improved design utilizes custom-designed hinges to enable a foldable aluminum extrusion frame that eliminates the need for extensive disassembly. By replacing the previous double-extrusion system with a lighter single-extrusion design, the array becomes more transportable without compromising structural integrity. Stability is maintained through the use of sandbags strategically placed on the base. Integrated handles allow for easier carrying, while the foldable design ensures the system can be quickly deployed or packed away without tools. These improvements directly support operational efficiency, particularly in field conditions where time and ease of setup are crucial.
Tracking a Magnetic Pinger Attached to a UUV
Students: Matthew Mckeon (EE), Zach Oliu (EE), Justin Pulley (EE)
Advisor: Dr. Gerard Carroll
 This project, commissioned by the Carderock US Navy, aims to improve the continuous tracking of an unmanned underwater vehicle (UUV) equipped with a magnetic pinger. Traditional methods for estimating the vehicle’s position rely on localizing the pinger through nonlinear inversion of magnetometer data using the Levenberg–Marquardt algorithm. However, when deployed in challenging underwater environments, these estimates suffer from noise and near-field magnetic propagation effects. To address these limitations, a Kalman filter is developed to fuse the noisy magnetic pinger measurements with the vehicle’s velocity and heading information derived from GPS data. Operating at a fine time resolution (0.25-second increments), the filter uses a constant-velocity model to predict the vehicle's motion and gradually incorporates magnetic measurements as they become reliable during the tracking period. The performance of the tracker is evaluated using root-mean-square error (RMSE) relative to an ideal straight-line reference obtained from a decimated high-resolution track. Initial results indicate that the fused tracking solution exhibits improved smoothness and accuracy compared to using GPS data or magnetic data alone. These findings underscore the potential of sensor fusion to enhance real-time tracking of UUVs in complex underwater environments.
This project, commissioned by the Carderock US Navy, aims to improve the continuous tracking of an unmanned underwater vehicle (UUV) equipped with a magnetic pinger. Traditional methods for estimating the vehicle’s position rely on localizing the pinger through nonlinear inversion of magnetometer data using the Levenberg–Marquardt algorithm. However, when deployed in challenging underwater environments, these estimates suffer from noise and near-field magnetic propagation effects. To address these limitations, a Kalman filter is developed to fuse the noisy magnetic pinger measurements with the vehicle’s velocity and heading information derived from GPS data. Operating at a fine time resolution (0.25-second increments), the filter uses a constant-velocity model to predict the vehicle's motion and gradually incorporates magnetic measurements as they become reliable during the tracking period. The performance of the tracker is evaluated using root-mean-square error (RMSE) relative to an ideal straight-line reference obtained from a decimated high-resolution track. Initial results indicate that the fused tracking solution exhibits improved smoothness and accuracy compared to using GPS data or magnetic data alone. These findings underscore the potential of sensor fusion to enhance real-time tracking of UUVs in complex underwater environments.
Capstan Control System
Students: Jomari Pagdanganan (ME), Christopher Rose (ME), Nathan Lovell (CE), Grady Espinal (CE)
Advisor: Dr. Gerard Carroll
 The positioning of heavy vehicles, such as railcars and cargo ships, is a time and labor-intensive process. Automation of this process is desired by the freight transportation industry because of the potential for lower time and manpower costs, which would increase the overall efficiency of railyards and ports. This project presents a control system designed for the autonomous operation of capstans – winch-like devices used for pulling heavy vehicles. A lab-scale model was built, through which the control system is demonstrated by positioning a G-scale model railcar along a one-dimensional track. The control system is designed to receive feedback about the railcar’s position from a set of ultrasonic sensors, and to use this feedback to adjust the angular velocity and direction of the capstans in real-time. Thus, the control system is able to autonomously pull the model railcar from any starting position along the track to a pre-set target position. This project serves as a proof-of-concept for position-based control systems using capstans and ultrasonic sensors, and demonstrates the potential of such systems for increasing the efficiency of heavy vehicle movement.
The positioning of heavy vehicles, such as railcars and cargo ships, is a time and labor-intensive process. Automation of this process is desired by the freight transportation industry because of the potential for lower time and manpower costs, which would increase the overall efficiency of railyards and ports. This project presents a control system designed for the autonomous operation of capstans – winch-like devices used for pulling heavy vehicles. A lab-scale model was built, through which the control system is demonstrated by positioning a G-scale model railcar along a one-dimensional track. The control system is designed to receive feedback about the railcar’s position from a set of ultrasonic sensors, and to use this feedback to adjust the angular velocity and direction of the capstans in real-time. Thus, the control system is able to autonomously pull the model railcar from any starting position along the track to a pre-set target position. This project serves as a proof-of-concept for position-based control systems using capstans and ultrasonic sensors, and demonstrates the potential of such systems for increasing the efficiency of heavy vehicle movement.
Structural Health Monitoring System
Students: Leonardo Morales (CE), Noah Phillip Ventura (ME), Nick Troy (ME), Chilowe Osai (CE)
Advisor: Dr. Jandro Abot
 Real-time monitoring of underwater structures is essential for evaluating their integrity and performance under various loading conditions, particularly for detecting early-stage damage on-site. These structures often operate in harsh, high-pressure environments and are subjected to dynamic and complex stress patterns. Without continuous and accurate monitoring, small issues can go unnoticed and potentially escalate into catastrophic failures, leading to costly repairs, environmental damage, or even loss of life. This project focuses on the development of a smart pressure vessel integrated with portable electronics designed to continuously assess the structural health of underwater systems. The smart vessel will serve as a self-contained platform capable of detecting changes in pressure, strain, and other critical parameters. By embedding piezoresistive carbon nanotube fiber sensors directly into the structure, comprehensive and high-resolution data can be collected in real-time, enabling continuous monitoring without the need for frequent manual inspections. The software will identify damage by detecting significant changes in electrical resistance through the carbon nanotube fiber. This integration facilitates proactive maintenance by identifying signs of degradation before they become severe, reducing downtime and maintenance costs. The ultimate objective is to improve the safety, reliability, and longevity of underwater structures by facilitating proactive maintenance through real-time data insights.
Real-time monitoring of underwater structures is essential for evaluating their integrity and performance under various loading conditions, particularly for detecting early-stage damage on-site. These structures often operate in harsh, high-pressure environments and are subjected to dynamic and complex stress patterns. Without continuous and accurate monitoring, small issues can go unnoticed and potentially escalate into catastrophic failures, leading to costly repairs, environmental damage, or even loss of life. This project focuses on the development of a smart pressure vessel integrated with portable electronics designed to continuously assess the structural health of underwater systems. The smart vessel will serve as a self-contained platform capable of detecting changes in pressure, strain, and other critical parameters. By embedding piezoresistive carbon nanotube fiber sensors directly into the structure, comprehensive and high-resolution data can be collected in real-time, enabling continuous monitoring without the need for frequent manual inspections. The software will identify damage by detecting significant changes in electrical resistance through the carbon nanotube fiber. This integration facilitates proactive maintenance by identifying signs of degradation before they become severe, reducing downtime and maintenance costs. The ultimate objective is to improve the safety, reliability, and longevity of underwater structures by facilitating proactive maintenance through real-time data insights.
Self-Sensing Temperature Monitoring System Using Carbon Nanotube Yarn Embedded in Epoxy Composites
Students: Alejandro Reyes (ME), Jeffrey Koeferl (CSC), Natan Bokretzion (CSC)
Advisor: Dr. Jandro Abot
 This project introduces a novel self-sensing temperature monitoring system utilizing Carbon Nanotube Yarn (CNTY) embedded within an epoxy resin matrix to detect internal temperature changes. CNTY exhibits negative thermal resistivity, meaning its electrical resistance decreases as temperature increases, and compounded with its small size, real time data acquisition and simple measurements make them an ideal candidate for self-sensing applications. The sensor system was developed by embedding CNTY and copper electrodes into epoxy samples fabricated using 3D-printed molds. The epoxy matrix provided mechanical stability and thermal durability, while the copper electrodes enabled accurate resistance measurements. Multiple prototypes with varying thicknesses (3mm, 4mm, and 5mm) were tested using multimeter readings and controlled heating in a drying oven. Results consistently showed resistance values below 700 ohms and confirmed a linear relationship between temperature and electrical resistance for temperatures up to 120°C This relationship allowed for the formulation of a predictive equation capable of estimating internal temperature in real time. Calibration was further refined using NI Signal Express software and a data acquisition system, enhancing accuracy and reliability. The demonstration of live temperature prediction based on resistance values confirms the potential of CNTY as an embedded sensor material in structural composites. This research lays the foundation for the development of multifunctional materials capable of self-monitoring in harsh or inaccessible environments. Future validation in vacuum furnace conditions will help confirm the sensor’s performance in more extreme thermal scenarios, supporting broader applications in aerospace and automotive engineering, and smart infrastructure systems.
This project introduces a novel self-sensing temperature monitoring system utilizing Carbon Nanotube Yarn (CNTY) embedded within an epoxy resin matrix to detect internal temperature changes. CNTY exhibits negative thermal resistivity, meaning its electrical resistance decreases as temperature increases, and compounded with its small size, real time data acquisition and simple measurements make them an ideal candidate for self-sensing applications. The sensor system was developed by embedding CNTY and copper electrodes into epoxy samples fabricated using 3D-printed molds. The epoxy matrix provided mechanical stability and thermal durability, while the copper electrodes enabled accurate resistance measurements. Multiple prototypes with varying thicknesses (3mm, 4mm, and 5mm) were tested using multimeter readings and controlled heating in a drying oven. Results consistently showed resistance values below 700 ohms and confirmed a linear relationship between temperature and electrical resistance for temperatures up to 120°C This relationship allowed for the formulation of a predictive equation capable of estimating internal temperature in real time. Calibration was further refined using NI Signal Express software and a data acquisition system, enhancing accuracy and reliability. The demonstration of live temperature prediction based on resistance values confirms the potential of CNTY as an embedded sensor material in structural composites. This research lays the foundation for the development of multifunctional materials capable of self-monitoring in harsh or inaccessible environments. Future validation in vacuum furnace conditions will help confirm the sensor’s performance in more extreme thermal scenarios, supporting broader applications in aerospace and automotive engineering, and smart infrastructure systems.
Electromechanical Prosthetic Hand with Tactile Sensing and Feedback
Students: Matthew Vandegrift (EE), John Northon (ME), Jevontae Fearwell (ME), Sadeel Algeseri (BE)
Advisor: Dr. Jandro Abot
 The project details the design, development, and prototyping of an electromechanical prosthetic hand that integrates both pressure and temperature sensitivity in restoring tactile function for below-the-elbow amputees. By combining principles from both body-powered and myoelectric prostheses, the design leverages the advantages of a hybrid system to enhance user control and feedback. The mechanical subsystem, which is embodied by the "David" series design, is a fabricate of 3D-printed polylactic acid, and also employs servo motors as well as friction pins to achieve precision when it comes to human-like motion. The structure is complemented by an innovative sensing system that utilizes polydimethylsiloxane-coated carbon nanotube yarn sensors for high-resolution force detection, which is paired with temperature sensors to capture thermal variations during object interaction. Central to the design is a Raspberry Pi that processes input signals from multiple sources. Electromyography sensors, integrated with a MyoWare amplifier, capture muscle contractions that control the hand's movement. Simultaneously, analog-to-digital conversion allows the Pi to interpret data from both the carbon nanotube yarn and temperature sensors, thereby facilitating real-time feedback. The feedback is delivered to the user through a dual-modality system where a pressure cuff adapted from a traditional blood pressure device offers tactile pressure feedback. At the same time, the Peltier coolers modulate temperature cues, thereby enhancing the user's sensory experience. Finally, a portable and rechargeable battery allows for the operation of these systems with minimal obstruction to the user's movements.
The project details the design, development, and prototyping of an electromechanical prosthetic hand that integrates both pressure and temperature sensitivity in restoring tactile function for below-the-elbow amputees. By combining principles from both body-powered and myoelectric prostheses, the design leverages the advantages of a hybrid system to enhance user control and feedback. The mechanical subsystem, which is embodied by the "David" series design, is a fabricate of 3D-printed polylactic acid, and also employs servo motors as well as friction pins to achieve precision when it comes to human-like motion. The structure is complemented by an innovative sensing system that utilizes polydimethylsiloxane-coated carbon nanotube yarn sensors for high-resolution force detection, which is paired with temperature sensors to capture thermal variations during object interaction. Central to the design is a Raspberry Pi that processes input signals from multiple sources. Electromyography sensors, integrated with a MyoWare amplifier, capture muscle contractions that control the hand's movement. Simultaneously, analog-to-digital conversion allows the Pi to interpret data from both the carbon nanotube yarn and temperature sensors, thereby facilitating real-time feedback. The feedback is delivered to the user through a dual-modality system where a pressure cuff adapted from a traditional blood pressure device offers tactile pressure feedback. At the same time, the Peltier coolers modulate temperature cues, thereby enhancing the user's sensory experience. Finally, a portable and rechargeable battery allows for the operation of these systems with minimal obstruction to the user's movements.
Quality of Life Plus - Custom Bicycle Seat for a USMC Cancer Survivor
Students: Kathleen Delate (ME), Andrew Lowman (BE), Clarisse Quitain Dapul (BE), Daniel Zhao (BE)
Advisor: Dr. Gregory Behrmann
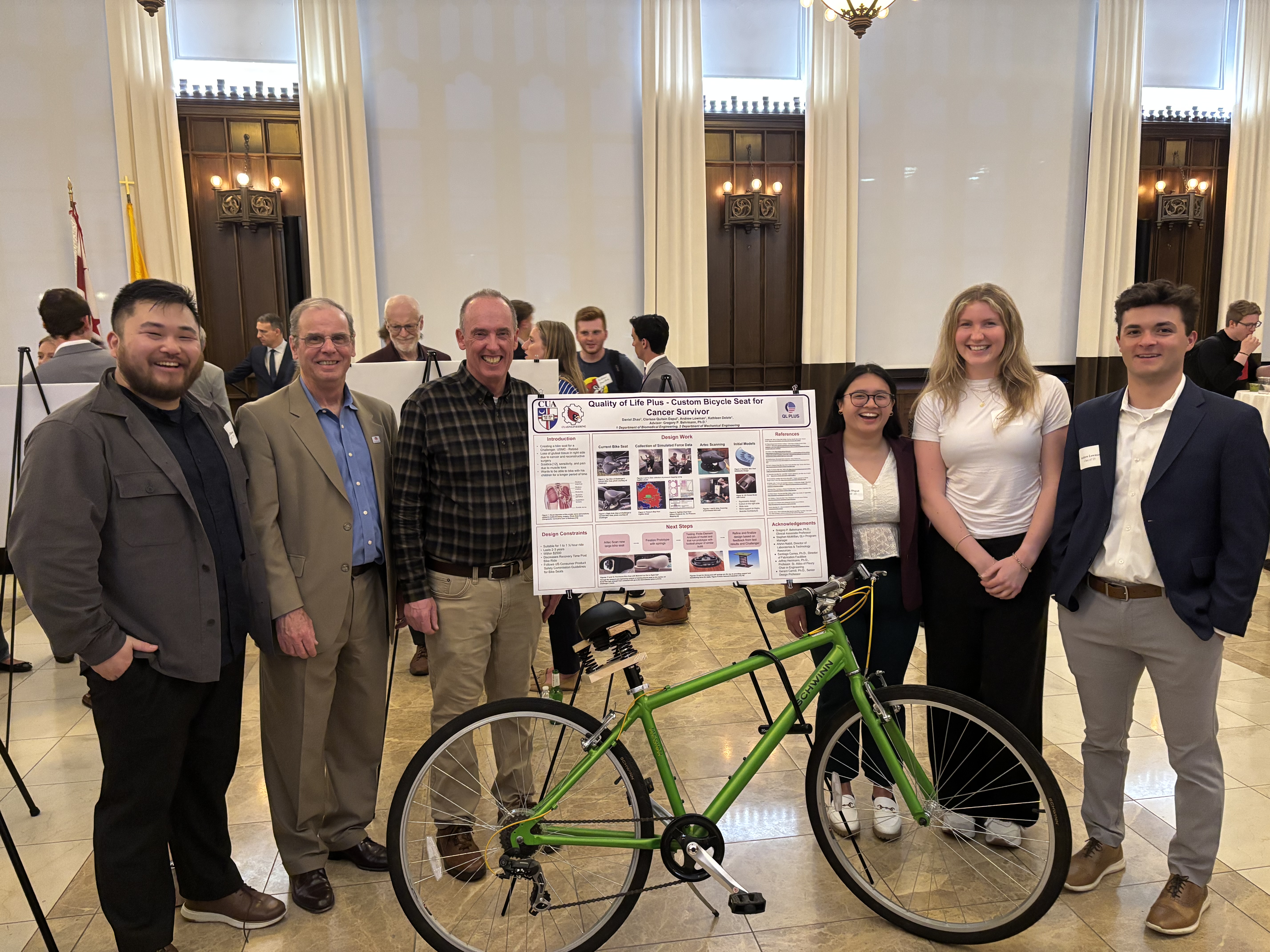 The objective of this project was to create a custom bike seat for a USMC veteran who underwent reconstructive surgery due to the removal of a cancerous tumor from his right gluteal region. Extensive remodeling of an existing bike seat was conducted to make it more comfortable for the Challenger to ride a bike for an hour with his children. To relieve the Challenger's pain through improved shock absorption, four springs were connected underneath the seat to a plate on the bike post. In addition, a cutout on the right side of the seat, where the Challenger experiences the most pain and pressure while sitting, was created to reduce the amount of contact between the Challenger's glute and the material of the bike seat so that his pain may be further relieved. Fujifilm pressure mapping sheets were used to simulate force and give data regarding areas of pressure obtained from a football player of similar size and build as that of the Challenger. Due to the inconclusive results of the Fujifilm mapping, further tests were performed using aluminum foil to measure the football player's sit bone. The use of Artec 3D scanning, which captures an object's frame and uploads a 3D scan onto its online software, helped determine the bike seat dimensions and create a finite element analysis. The results and bike seat design serve to reduce the ongoing pain the Challenger frequently experiences while biking with his children.
The objective of this project was to create a custom bike seat for a USMC veteran who underwent reconstructive surgery due to the removal of a cancerous tumor from his right gluteal region. Extensive remodeling of an existing bike seat was conducted to make it more comfortable for the Challenger to ride a bike for an hour with his children. To relieve the Challenger's pain through improved shock absorption, four springs were connected underneath the seat to a plate on the bike post. In addition, a cutout on the right side of the seat, where the Challenger experiences the most pain and pressure while sitting, was created to reduce the amount of contact between the Challenger's glute and the material of the bike seat so that his pain may be further relieved. Fujifilm pressure mapping sheets were used to simulate force and give data regarding areas of pressure obtained from a football player of similar size and build as that of the Challenger. Due to the inconclusive results of the Fujifilm mapping, further tests were performed using aluminum foil to measure the football player's sit bone. The use of Artec 3D scanning, which captures an object's frame and uploads a 3D scan onto its online software, helped determine the bike seat dimensions and create a finite element analysis. The results and bike seat design serve to reduce the ongoing pain the Challenger frequently experiences while biking with his children.
CAT to CAD: 3D Printing and Casting for Surgical Planning
Students: Amir Ingram (CSC), Louis Nwuha (BE), Abigail Post (BE), Renad Alshahrani (BE)
Advisor: Dr. Gregory Behrmann
 This project outlines a process for turning medical images into accurate, patient-specific 3D models used for surgical planning. The goal is to show how realistic models can be created through high-resolution 3D printing and silicone casting to support surgical procedures. These models help surgeons plan operations, explain procedures to patients, train medical staff, and improve surgical accuracy and outcomes. The process starts with medical imaging data, such as CT scans, which are turned into 3D-printable STL files using 3D Slicer software. The features in the image are extracted using preset thresholds to isolate structures. The files are then printed using high-resolution 3D printers to ensure high quality and accuracy. Silicone casting is used to recreate soft tissue features, making the models more realistic in both structure and texture. After assembling the model components, the printed and cast parts are compared to the original CT scans. Input from radiologists helps confirm that the models are accurate and usable, and the process is adjusted as needed to improve results. This workflow aims to reduce preparation time and make surgical planning more accessible, especially for complex cases. The process is affordable and reliable enough to be used in schools, hospitals, and by medical device companies, supporting better patient care, training, and surgical outcomes.
This project outlines a process for turning medical images into accurate, patient-specific 3D models used for surgical planning. The goal is to show how realistic models can be created through high-resolution 3D printing and silicone casting to support surgical procedures. These models help surgeons plan operations, explain procedures to patients, train medical staff, and improve surgical accuracy and outcomes. The process starts with medical imaging data, such as CT scans, which are turned into 3D-printable STL files using 3D Slicer software. The features in the image are extracted using preset thresholds to isolate structures. The files are then printed using high-resolution 3D printers to ensure high quality and accuracy. Silicone casting is used to recreate soft tissue features, making the models more realistic in both structure and texture. After assembling the model components, the printed and cast parts are compared to the original CT scans. Input from radiologists helps confirm that the models are accurate and usable, and the process is adjusted as needed to improve results. This workflow aims to reduce preparation time and make surgical planning more accessible, especially for complex cases. The process is affordable and reliable enough to be used in schools, hospitals, and by medical device companies, supporting better patient care, training, and surgical outcomes.
Electromechanical Steerable Ablation Catheter
Students: Michael Bellacicco (ME), Savannah Hensley (BE), Reham Alshahrani (BE), Robert Lemanski (ME)
Advisor: Dr. Gregory Behrmann
 The goal of this project is to design, manufacture, and test a radiofrequency (RF) cardiac ablation catheter with electromechanical steering capabilities used for a variety of medical procedures to treat heart arrhythmias. Current ablation catheters are predominantly mechanically driven therefore the team integrated an electromechanical component to improve steering capabilities and reduce electrophysiologist fatigue. The team accomplished this task by redesigning the internal mechanism of a Safire Bi-Directional Ablation Catheter, manufactured by St. Jude Medical, from mechanically driven to electrically driven. This handle incorporates a servo motor with a round attachment, connected to the pins of an existing gear train and wires that control the tip of the catheter. A thumb wheel-controlled potentiometer was implemented on top of the handle allowing for single-handed operation, improving user control and ease of use in clinical settings. The catheter will undergo three testing phases: a potato ablation test to evaluate its effectiveness when connected to the RF (heat) source, a steerability test to verify the catheters’ ability to navigate through the designed testbed that replicates a typical cardiac ablation pathway, and a combination of the ablation and steerability test. The goal of testing will be to ensure our team created a safe and easy to use device. This device should incorporate the needs of the electrophysiologist, including precise steering capabilities to reduce user fatigue. Overall, this catheter is designed to increase cardiac ablation procedural success.
The goal of this project is to design, manufacture, and test a radiofrequency (RF) cardiac ablation catheter with electromechanical steering capabilities used for a variety of medical procedures to treat heart arrhythmias. Current ablation catheters are predominantly mechanically driven therefore the team integrated an electromechanical component to improve steering capabilities and reduce electrophysiologist fatigue. The team accomplished this task by redesigning the internal mechanism of a Safire Bi-Directional Ablation Catheter, manufactured by St. Jude Medical, from mechanically driven to electrically driven. This handle incorporates a servo motor with a round attachment, connected to the pins of an existing gear train and wires that control the tip of the catheter. A thumb wheel-controlled potentiometer was implemented on top of the handle allowing for single-handed operation, improving user control and ease of use in clinical settings. The catheter will undergo three testing phases: a potato ablation test to evaluate its effectiveness when connected to the RF (heat) source, a steerability test to verify the catheters’ ability to navigate through the designed testbed that replicates a typical cardiac ablation pathway, and a combination of the ablation and steerability test. The goal of testing will be to ensure our team created a safe and easy to use device. This device should incorporate the needs of the electrophysiologist, including precise steering capabilities to reduce user fatigue. Overall, this catheter is designed to increase cardiac ablation procedural success.